こんにちは、Team浪漫 東京大学側ものづくり部門副部門長、およびラリーコンピュータ製作統括を務めている、副リーダーの大岸と申します。
今回の投稿では、整備合宿中に行われたラリーコンピュータの集中開発、および試作機1号についてお伝えします。技術的な話が多く、堅い記事になってしまいましたがご了承ください。
ラリーコンピュータとは、「決められた区間に沿って、決められた速度で走行する」ことを要求されるレギュラリティラリーにおいて、自車の走行距離や平均速度などを計算、表示することでドライバーをサポートするコンピュータのことです。温度変化に対する頑強性、車内に飛び交うノイズに負けない信頼性が必要になります。機能としては、大きく「正確に車速・自車位置を算出する機能」と、「ドライバーのミスコースを防ぐ機能」の2つが求められるので、この合宿でまずは1つ目の機能を開発しました。
車速を検出するための構造は複数考えられますが、今年は「従動輪センシング」と呼ばれる、従動輪に回転センサをつけることで、駆動輪がスリップしても検出精度を保てる構造を採用します。その構造のベースとなる、ホールICを用いた速度・自車位置の検出機能を作成しました。これは、ブレーキディスクに磁石を取り付けて回転させ、ある一か所に固定した磁気センサ(ホールIC)を用いて磁石の通過を検出する方法です。これを実装し、動作確認を行いました。

ユーザーインターフェースについても工夫しています。数値入力はタブレットではなく、プッシュ式の原始的な押しボタンのテンキーを採用します。これは、視覚表示に頼るよりも、指先からの触覚フィードバックがあったほうが直感的に操作できると考えたためです。
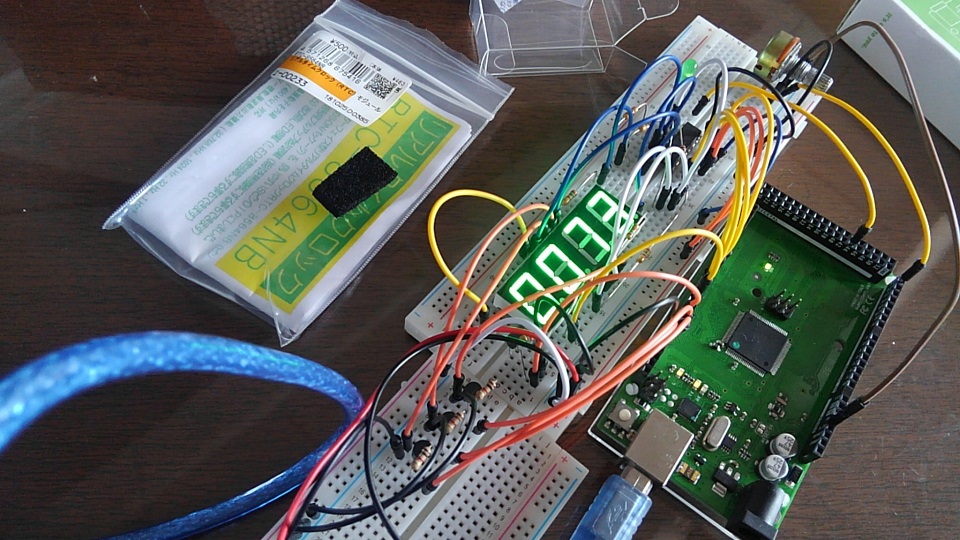
また、ディスプレイは7segLEDを採用し、遠くからでも見やすいディスプレイとしました。さらに、可変抵抗を用いて明るさを変更できるようにしました。これによって、夜間・昼間両方で見やすいディスプレイを実現しています。
また、PC(パスコントロール)処理、CP(チェックポイント)処理、MAP(マップ)処理、OD(オドメータチェック)処理といった、レギュラリティラリー特有の機能についても実装を行いました。条件分岐が非常に多く、担当者には非常に大きな負担をかけてしまいました。
さらに、RTCモジュール(高精度な発振回路を内蔵したIC)を用いることで、正確な時刻計測を行います。時刻計測が正確であれば、距離計算もより正確に行えるようになるためです。
その他、ミスコースを防止するために、パソコンに情報を転送して自車位置を可視化できると都合がよいです。今回はそのベースとなる、Bluetooth通信でPCに速度・位置情報を送信するシステムの構築を行いました。Bluetoothは、車内を飛び交うノイズに影響を受けにくいため、ノイズ対策にもなると考えられます。
以上の機能を組み合わせて、試作機一号が完成しました。動作風景は以下のようになりました。8月4日のTOYOTA GAZOO Racing PARKにてネッツトヨタ富山様からいただいたペーパークラフトを使用しています。
プログラム・回路双方について、ものづくり部門のメンバー(鈴木・原田・福井・松浦・吉原)にとても大きな協力をいただきました。この場を借りてメンバーに感謝します。
この一号機では、特に回転センサの耐久性に大きな課題があります。今後は、まず金属製のスペーサを自作して磁石を埋め込み、ラリー車の従動輪に組み込んで回転センサとすることを目指します。最終的には、ホールICではなく、電磁ピックアップと呼ばれる、現在の車のABSセンサに用いられるセンサを入手し使用することで、さらに検出精度を上げていきたいと考えています。